
新型托辊无源空间纠偏装置
2023-04-20孙源 冯宜语
(枣庄科技职业学院)
0 引言
带式输送机跑偏在物料输送过程中时有发生,是造成带式输送机局部或全线撒料、输送带边缘磨损和撕裂的主要原因。研究证明造成输送带跑偏的因素很多,但归根结底是输送带在运动中受力不平衡,形成了垂直于带速方向的水平速度[1]。现阶段,针对不同原因造成的输送带跑偏现象采取了不同的纠偏措施,现场经常使用的TD75、DTII标准纠偏托辊组是按现行行业标准设计制作的,经过现场验证能够实现纠偏目的,但在使用过程中存在托辊脱落、转轴断裂、连杆动作不协调、输送带磨损严重等缺陷。无源空间纠偏装置在标准调偏托辊组的基础上进行关键结构优化创新,采用多自由度的空间旋转机构及可转动立辊组合,从多个方面利用带式输送机的纠偏原理进行工作,可较好地解决上述问题。因此,无源空间纠偏装置的研究意义重大。
1 无源空间纠偏装置的结构分析
1.1 无源空间纠偏装置的机械结构
无源空间纠偏装置由纠偏托辊、纠偏支架、限位板、限位轮、纠偏旋转座、立辊调节杆、立辊、固定连杆组成,见图1。其中纠偏支架设计有三个支承面,三个支承面设计呈凹型,纠偏托辊设置在纠偏支架的支承面上,纠偏支架通过纠偏旋转座连接到固定连杆上,固定连杆固定在输送机的支架上,立辊通过立辊调节杆固定在纠偏支架的一端,限位板设置在固定连杆的一端,限位轮也设置在纠偏支架一端,且限位板和限位轮设置为相切,限位板沿输送带运行方向前高后低设置。

1. 纠偏托辊;2. 纠偏支架;3. 固定连杆;4. 纠偏旋转座;5. 限位板;6. 限位轮;7. 立辊调节杆;8. 立辊
图1 无源空间纠偏装置结构图
1.2 无源空间纠偏装置关键结构优化
普通调心托辊纠偏支架只能以固定的圆心前后移动[2]。无源空间纠偏装置采用空间旋转机构,如图2。机构内部使用两个万向轴承,纠偏支架有水平和竖直两个方向的自由度,即可以使纠偏支架以纠偏旋转座为中心同时前后移动和上下移动。装置中限位板和限位轮为相切关系(见图1),可较好地控制纠偏支架的运动轨迹。在动作过程中,不仅可实现前后移动纠偏,而且可实现上下移动纠偏,纠偏更加迅速,纠偏力更大。这种结构的改进,改变了原有的标准型纠偏托辊组只能在平面内进行纠偏动作的状况。
标准型纠偏托辊组左右立辊只有一个,无源空间纠偏装置每一侧使用两个立辊,这样使得胶带触发立辊的动作更可靠,反应更灵敏,同时会减少胶带的磨损。

图2 纠偏旋转座
2 无源多自由度纠偏装置的工作原理
带式输送机的常用纠偏方式是沿胶带运行方向,输送带往哪侧偏托辊组就相应向前调整以达到纠偏目的。无源空间纠偏装置在输送带跑偏时,输送带给立辊施加作用力,通过立辊调节杆使纠偏支架绕纠偏旋转座竖直中心线转动,并推动纠偏托辊沿纠偏旋转座竖直中心线转动,即向输送带运行方向旋转,使纠偏托辊中心线投影与输送带中心线有一定夹角,过程如图3所示。

图3 输送带跑偏示意
输送带向前运行时给托辊一个向前的牵引力Fq,这个牵引力分解为使托辊转动的分力Fz和一个横向分力Fc,Fc使托辊轴向窜动,由于托辊支架的固定限制托辊轴向窜动,它必然就会对胶带产生一个反作用力Fy,使胶带向另一侧移动,如图4所示,从而实现纠偏目的。

图4 托辊受力分析
在限位板的作用下,限位轮沿限位板的接触面运动,带动纠偏支架在多自由度旋转机构的运动极限范围内致跑偏一侧抬高,如图5所示,在抬高过程中促使纠偏支架在两个自由度内运动。无源空间纠偏装置在空间上给予跑偏胶带一组向心力(向带式输送机中心线),以达到纠偏目的。限位板角度可调,可根据需要调节抬高值,更便于纠偏。
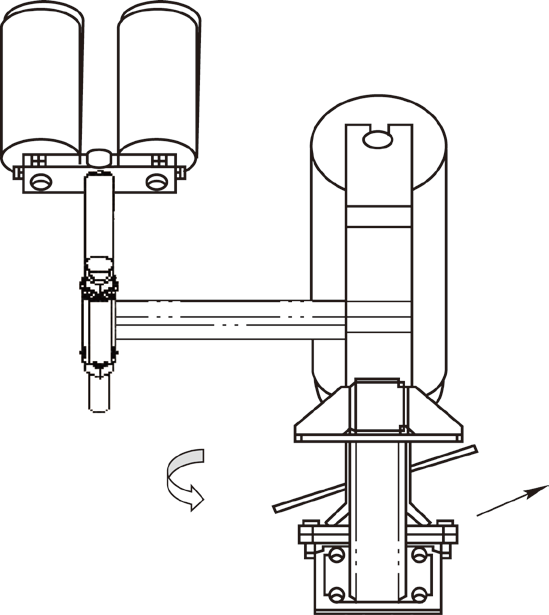
图5 纠偏托辊上下运动示意图
3 总结
无源空间纠偏装置是在标准型纠偏托辊组的基础上优化改进而成,该纠偏装置无动力源、可实现空间纠偏;全机械结构,结构简单、安装维护方便;具有合理的限位机构,自动调节,功能可靠;具有更大的纠偏范围。无源纠偏装置具有非常大的发展空间,且具有广泛的应用前景,推广价值极高。
(来源:起重运输机械杂志社)
